En el entorno de la robótica y la automatización, los motores paso a paso son esenciales para movimientos precisos y controlados. Y para aprovechar al máximo su potencial, el controlador A4988 se convierte en un aliado indispensable. Esta tutorial te llevará de la mano por el maravilloso entorno de estos componentes, desde sus fundamentos hasta la implementación práctica con Arduino.
 : Programacion en arduino, Montaje y Test.")
¿Qué son los Motores Paso a Paso?
Los motores paso a paso, a diferencia de los motores DC tradicionales, se basan en un principio de funcionamiento único. En lugar de girar continuamente, estos motores avanzan en pasos discretos, rotando un ángulo fijo por cada pulso eléctrico que reciben. Cada paso corresponde a un ángulo determinado, por ejemplo, 8° o 0.9°. Esta característica los convierte en ideales para aplicaciones que requieren un control de posición preciso, como impresoras 3D, máquinas CNC, robots y mucho más.
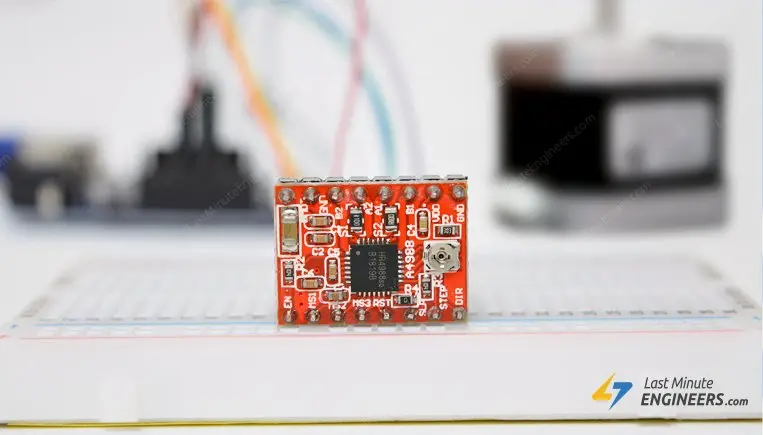
El Controlador A4988: Un Aliado para tus Motores Paso a Paso
El controlador A4988 es un chip dedicado al control de motores paso a paso. Su diseño se caracteriza por su simplicidad y versatilidad, convirtiéndolo en una opción popular en proyectos Arduino. Aquí te presentamos algunas de sus ventajas:
- Microstepping: Permite dividir un paso en pasos más pequeños, lo que mejora la suavidad del movimiento y reduce el ruido.
- Control de Corriente: Regula la corriente que fluye hacia el motor, lo que optimiza el rendimiento y reduce el calentamiento del motor.
- Simplicidad de Conexión: Solo se necesitan dos pines para controlar la dirección y el paso del motor.
- Protección: Incorpora características de seguridad como protección contra sobrecorriente, subvoltaje y sobrecalentamiento.
Entendiendo el A4988: Conociendo sus Pines
El A4988 presenta un conjunto de pines que permiten su configuración y conexión con los motores y la placa Arduino. Estos pines se pueden dividir en:
Pines de Alimentación
- VDD y GND: Estos pines alimentan la lógica interna del controlador, con un voltaje entre 3V y 5V.
- VMOT y GND: Estos pines alimentan el motor, con un voltaje entre 8V y 35V. Se recomienda un condensador electrolítico de 100μF (o al menos 47μF) para proteger el controlador de las fluctuaciones de voltaje.
Pines de Selección de Microsteps
- MS1, MS2, MS3: Estos pines permiten seleccionar la resolución de microsteps, desde un paso completo (full step) hasta un paso de 1/1Cada combinación de niveles lógicos en estos pines define una resolución específica. Es importante destacar que si se dejan sin conectar, el controlador funcionará en modo full step.
Pines de Control
- STEP: Este pin recibe pulsos para indicar al motor que dé un paso. La frecuencia de los pulsos determina la velocidad del motor.
- DIR: Este pin define la dirección de rotación del motor. Un nivel lógico HIGH lo hace girar en sentido horario, mientras que un nivel lógico LOW lo hace girar en sentido antihorario.
Pines de Control de Estado
- EN: Este pin, de activación baja, habilita o deshabilita el controlador. Si se mantiene en nivel lógico LOW, el controlador está activado. Si se pone en nivel lógico HIGH, el controlador se desactiva.
- SLP: Este pin, también de activación baja, pone el controlador en modo de suspensión, reduciendo el consumo de energía. Cuando se mantiene en nivel lógico LOW, el controlador entra en modo de suspensión.
- RST: Este pin, de activación baja, reinicia el controlador, restableciendo el traductor interno a un estado definido. Si se mantiene en nivel lógico LOW, el controlador se reinicia.
Pines de Salida
- 1A, 1B, 2A, 2B: Estos pines son las salidas que se conectan a las bobinas del motor paso a paso.
Configurando el Controlador A4988: Limitación de Corriente
Una de las características importantes del controlador A4988 es la posibilidad de limitar la corriente que fluye hacia el motor. Esto es crucial para proteger el motor y evitar su sobrecalentamiento. Para ajustar la corriente, se utiliza un potenciómetro trimmer que se encuentra en la placa del controlador. La corriente se ajusta midiendo el voltaje (Vref) en el pin "ref" o midiendo la corriente que fluye a través de una bobina del motor.
El valor de Vref se determina mediante la siguiente fórmula: Vref = Corriente Limitada / 5
Conectando el A4988 a Arduino
Ahora que conocemos los componentes y sus funciones, es momento de conectar el controlador A4988 a nuestra placa Arduino. Para ello, seguiremos estos pasos:
- Conexión de Alimentación: Conecta los pines VDD y GND del controlador a los pines 5V y GND de Arduino, respectivamente. Conecta el pin VMOT a una fuente de alimentación externa, como un adaptador de pared, asegurándote de que proporcione el voltaje adecuado para el motor. Recuerda agregar el condensador electrolítico de 100μF (o 47μF) en paralelo con VMOT y GND.
- Conexión de Control: Conecta el pin STEP del controlador a un pin digital de salida de Arduino (por ejemplo, pin 2). Conecta el pin DIR del controlador a otro pin digital de salida de Arduino (por ejemplo, pin 3).
- Conexión del Motor: Conecta las cuatro bobinas del motor paso a paso a los pines 1A, 1B, 2A, 2B del controlador, respetando el orden de las bobinas. Puedes conectar un motor NEMA 17 o un motor similar.
- Conexión de Enable: Conecta el pin EN del controlador a un pin digital de salida de Arduino. Esto te permitirá controlar cuándo el motor está habilitado o deshabilitado.
- Configuración de Microsteps: Conecta los pines MS1, MS2, MS3 del controlador a los pines digitales de salida de Arduino, si deseas usar microstepping. Puedes conectar cada pin a un nivel lógico HIGH o LOW para seleccionar la resolución de microsteps.
Programación Arduino para Controlar el Motor Paso a Paso
Para controlar el motor paso a paso desde Arduino, puedes utilizar la biblioteca AccelStepper, que proporciona funciones avanzadas como control de velocidad, aceleración y desaceleración. Aquí te presentamos un ejemplo de código:
#include// Define los pines de conexiónconst int stepPin = 2;const int dirPin = 3;// Crea una instancia de la biblioteca AccelStepperAccelStepper stepper(1, stepPin, dirPin); void setup() { // Define la velocidad máxima, aceleración y posición inicial stepper.setMaxSpeed(1000); stepper.setAcceleration(50); stepper.setCurrentPosition(0); // Habilita el controlador digitalWrite(EN, LOW);}void loop() { // Mueve el motor a una posición específica stepper.moveTo(200); // Ejecuta el movimiento con aceleración y desaceleración stepper.run(); // Espera hasta que el motor llegue a la posición destino while (stepper.distanceToGo() != 0) { stepper.run(); } // Retraso para la próxima acción delay(1000);} Consejos para una Implementación Exitosa
- Protección contra Voltaje: Aunque el controlador tiene protección contra picos de voltaje, se recomienda utilizar un condensador electrolítico de 100μF (o 47μF) para una mayor seguridad.
- Disipación de Calor: El controlador A4988 genera calor durante el funcionamiento, por lo que se recomienda utilizar un disipador de calor para evitar el sobrecalentamiento.
- Control de Corriente: Ajusta la corriente límite del controlador de acuerdo con las especificaciones del motor para un funcionamiento óptimo.
- Microstepping: La elección de la resolución de microsteps dependerá de las necesidades de tu proyecto. Un microstepping más fino ofrece un movimiento más suave, pero también requiere más pulsos por segundo.
- Calibración: Es importante calibrar el sistema para garantizar que los pasos del motor coincidan con las unidades de movimiento del proyecto.
Aplicaciones del A4988 y los Motores Paso a Paso
El controlador A4988 y los motores paso a paso son ideales para una amplia variedad de proyectos, como:
- Impresoras 3D: El movimiento preciso de los ejes es crucial para la impresión de objetos tridimensionales.
- Máquinas CNC: Permiten el corte, grabado y fresado de materiales con precisión.
- Robots: Proporcionan movimientos controlados para diferentes tipos de robots.
- Sistemas de Automatización: Facilita la automatización de tareas repetitivas en diferentes industrias.
- Proyectos de Electrónica: Se utilizan para crear mecanismos de movimiento, posicionamiento y control en proyectos DIY.
El controlador A4988 y los motores paso a paso representan una combinación poderosa para proyectos de robótica, automatización y control de movimiento preciso. Con esta tutorial, ahora tienes la información y las herramientas necesarias para integrar estos componentes en tus proyectos Arduino y dar vida a tus ideas creativas.
Si quieres conocer otros artículos parecidos a Arduino, motor paso a paso y el controlador a4988 puedes visitar la categoría Motor.