Los motores paso a paso son una elección popular en sistemas de control de movimiento debido a su precisión, capacidad de posicionamiento y control de velocidad. Pero elegir el motor paso a paso correcto para tu aplicación puede ser un desafío, ya que hay muchos parámetros y consideraciones a tener en cuenta. Esta información te ayudará a navegar por el proceso de selección, asegurándote de que elijas el motor paso a paso ideal para tus necesidades.
Parámetros Clave a Considerar
Al seleccionar un motor paso a paso, ya sea rotatorio o lineal, hay varios parámetros cruciales que debes evaluar:
- Rango de Velocidad Requerido: Determina la velocidad máxima a la que el motor debe operar.
- Resolución y Precisión de Paso: Define la precisión de posicionamiento que necesitas. La resolución de paso se refiere al número de pasos por revolución del motor.
- Carga Máxima: Considera la carga que el motor debe mover en cada dirección, tanto en términos de torque para motores rotatorios como de fuerza para motores lineales.
- Tipo de Carga: Las cargas pueden ser friccionales, inerciales, de resorte mecánico, de choque o combinaciones de estas. Determina el tipo de carga para elegir un motor con suficiente capacidad de manejo.
- Orientación del Eje: Ten en cuenta la orientación física del eje del motor en tu aplicación.
- Alineación Mecánica: La alineación correcta del motor es crucial para un rendimiento óptimo.
- Tipo de Drive: Los drives de motores paso a paso son esenciales para controlar el movimiento. Hay dos tipos principales: Drives Chopper y Drives L/R.
- Modo de Paso: Determina el tipo de paso que deseas utilizar (paso completo, medio paso, cuarto paso, etc.)
- Aceleración y Desaceleración: Para movimientos precisos y suaves, considera la posibilidad de utilizar perfiles de aceleración y desaceleración.
- Ciclo de Trabajo: Define el tiempo de funcionamiento (energizado) en relación con el tiempo de reposo (o tiempo de potencia reducida).
- Niveles de Corriente de Funcionamiento y Hold: Los niveles de corriente de funcionamiento y Hold son importantes para el rendimiento del motor.
- Voltaje y Corriente Máximos del Drive: Asegúrate de que el drive tenga la capacidad de voltaje y corriente adecuadas para tu motor.
- Voltaje de Alimentación: El voltaje de alimentación debe estar dentro de los límites de voltaje nominal del motor.
- Condiciones Ambientales: Considera la temperatura, la humedad y otros factores ambientales en tu aplicación.
Tipos de Motores Paso a Paso
Existen dos tipos principales de motores paso a paso:
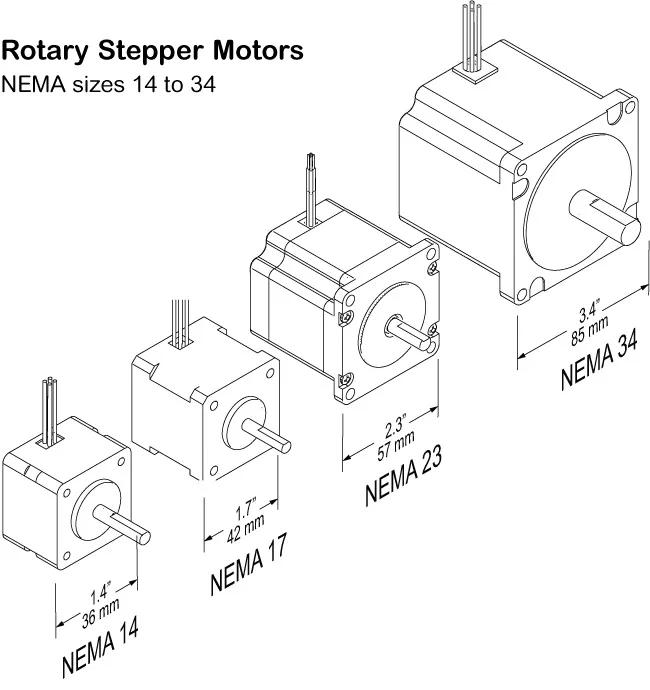
Motores Paso a Paso Rotatorios
Estos motores producen movimiento rotatorio y se caracterizan por su torque, velocidad y resolución de paso. Las especificaciones típicas incluyen curvas de torque máximo (Pull-Out Torque) en función de la velocidad. El torque se mide en unidades de Newton-centimetros o onzas-pulgadas. La velocidad se indica en pasos completos o medios pasos por segundo. Los ángulos de paso completos típicos son 0.45°, 0.9°, 8°, 75°, 5°, 15° o 18°.
Motores Paso a Paso Lineales
Los motores paso a paso lineales, también conocidos como actuadores lineales paso a paso, convierten el movimiento rotatorio en movimiento lineal utilizando un husillo de avance o un tornillo de bolas. Las especificaciones típicas incluyen curvas de fuerza máxima (Pull-In Force) en función de la velocidad. La fuerza se mide en unidades de Newtons, onzas-fuerza o libras-fuerza. La velocidad se indica en pasos completos o medios pasos por segundo. La resolución lineal depende del ángulo de paso completo y del paso del husillo o del tornillo de bolas.
Tipos de Drives de Motores Paso a Paso
Los drives de motores paso a paso son esenciales para controlar el movimiento del motor. Estos drives proporcionan la corriente y la señalización necesarias para que el motor funcione correctamente.
Drives L/R (Voltaje Constante)
Los drives L/R son drives de voltaje constante que utilizan una técnica de control de corriente de tipo inductancia/resistencia. Para una operación continua normal, el voltaje de salida (medido en las terminales del motor) se ajusta al voltaje nominal de la bobina del motor. Los drives L/R son más simples y económicos, pero su rendimiento de torque disminuye rápidamente en un rango de velocidad estrecho, principalmente debido a la inductancia del devanado y a la fuerza contraelectromotriz (FEM) del motor.

Drives Chopper (Corriente Constante)
Los drives Chopper son drives de corriente constante que utilizan una técnica de control de corriente que conmuta rápidamente un voltaje de fuente relativamente alto (en comparación con el voltaje nominal de la bobina del motor) en un ciclo de encendido y apagado. El proceso de conmutación, o "chopping", ocurre a frecuencias por encima del rango audible. Para una operación continua normal, la corriente de salida de este drive se ajusta a la corriente de fase nominal del motor. Los drives Chopper pueden proporcionar un alto torque en un rango de velocidad más amplio en comparación con los drives L/R, ya que el voltaje de fuente más alto ayuda a superar los efectos de la inductancia y la FEM del motor.
Efectos del "Current Starving" (Alimentación Limitada de Corriente)
El "current starving" es una condición en la que el motor no recibe suficiente corriente para operar a su capacidad total. Esto puede ocurrir cuando se establece el voltaje de salida de un drive L/R por debajo del voltaje nominal de la bobina del motor o cuando se establece la corriente de salida de un drive Chopper por debajo de la corriente de fase nominal del motor.

El "current starving" afecta negativamente al rendimiento del motor, lo que lleva a:
- Reducción del Torque o la Fuerza: El torque de un motor rotatorio y la fuerza de un motor lineal son directamente proporcionales a la cantidad de corriente. Cuando se reduce la corriente, el torque o la fuerza también se reducen.
- Pérdida de Precisión de Paso: En algunos casos, el "current starving" puede afectar la precisión de paso del motor.
- Aumento de las Pérdidas Internas: La fricción en los cojinetes y la resistencia interna del motor se vuelven más significativas cuando se reduce la corriente, lo que lleva a mayores pérdidas de potencia.
- Mayor Variación de Rendimiento: La variación de rendimiento entre motores puede ser mayor cuando se opera con una corriente limitada.
Aunque el "current starving" puede tener efectos negativos en el rendimiento del motor, también puede proporcionar algunos beneficios para aplicaciones específicas de baja carga, como:
- Respuesta de Paso Más Suave: La respuesta de paso del motor puede volverse más suave con una corriente limitada.
- Reducción del Ruido Audible: Se puede reducir el ruido audible del motor.
- Reducción de la Vibración: Se puede disminuir la vibración del motor.
- Reducción de la Resonancia: Se puede reducir la resonancia del motor.
Elección del Drive Adecuado
Para obtener el máximo rendimiento de tu motor paso a paso, es fundamental elegir el drive adecuado. Al seleccionar un drive, ten en cuenta los siguientes factores:
- Voltaje Nominal: Asegúrate de que el drive tenga un voltaje nominal compatible con el voltaje nominal del motor.
- Corriente Nominal: El drive debe poder entregar la corriente nominal necesaria para el motor.
- Inductancia: El drive debe tener un rango de inductancia compatible con la inductancia del motor.
La selección del motor paso a paso adecuado para tu aplicación es crucial para obtener un rendimiento óptimo y garantizar la confiabilidad a largo plazo. Al considerar cuidadosamente los parámetros clave, el tipo de motor, el tipo de drive y los posibles efectos del "current starving", puedes elegir el motor paso a paso perfecto que satisfaga tus necesidades específicas de control de movimiento. Con la información proporcionada en esta tutorial, ahora estás mejor equipado para tomar decisiones informadas que maximicen el rendimiento y la eficiencia de tus sistemas de control de movimiento.
Si quieres conocer otros artículos parecidos a Selección de motores paso a paso para elegir el motor perfecto puedes visitar la categoría Motor.